
Robot Antropomorfo V2.0
23 November 2017
su
su
di Giuseppe La Rosa
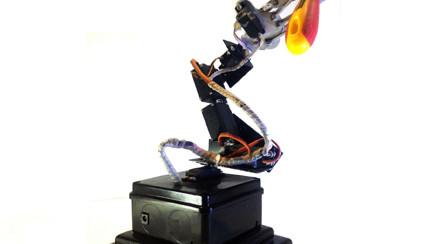
Questo articolo è la revisione 2.0 di uno dei miei progetti più seguiti: un robot antropomorfo. In questa nuova versione viene controllato da computer attraverso un’interfaccia USB. Il braccio è in grado di afferrare piccoli oggetti disposti entro un raggio di circa 20 cm, i movimenti sono attuati tramite servomotori per modellismo pilotati da una scheda con un ATMEGA328P, che colloquia con il programma di controllo installato nel PC.Il software può comandare il robot tramite tastiera, mouse o joystick. Esistono molti dispositivi simili in commercio: perché proporne un altro ancora? Perché questo progetto si realizza con un metodo innovativo che riduce quasi a zero l’impegno necessario alla realizzazione della parte meccanica e permette a chiunque di costruirsi un piccolo robot antropomorfo, spendendo una cifra modesta. In questo articolo spiegheremo come realizzare semplicemente questo braccio meccanico (figura 1) pilotabile da PC, capace di sei diverse art...